Faraday Future Autonomous HMI
Role
Interaction Design / HMI
Focus
Autonomous driving interaction model
Outcome
Patented center-console controller for autonomous vehicle interaction
Designing Trust Into Autonomous Driving
When early autonomous driving systems began appearing in production vehicles, one problem became clear: drivers often did not know when the car was actually driving itself.
During testing sessions at Faraday Future, I conducted a series of ride-alongs to observe how people interacted with autonomous driving features. What I discovered was surprising.
Drivers frequently believed the vehicle was still operating in autonomous mode when it had already disengaged.
In most systems, applying a small amount of torque to the steering wheel returns control to the driver. Participants often triggered this unintentionally while adjusting their hands, changing lanes, or interacting with controls.
In several cases, drivers did not realize the vehicle had switched back to manual control.
The technology itself was working correctly.
The issue was the interaction model.
Steering-wheel controls were designed for manual driving, yet they were still being used to interact with autonomous systems.
This insight led me to explore a different interaction model entirely: a dedicated control interface designed specifically for autonomous driving.
Research & Observations
Through ride-along testing and observational sessions, I began identifying patterns in driver behavior.
Participants often interacted with the steering wheel even when the vehicle was in autonomous mode. Small inputs intended to adjust speed or spacing would occasionally exceed the system’s torque threshold and disengage autonomy.
When this occurred, many drivers remained unaware that control had been returned to them.
When I pointed it out, the reaction was immediate.
Drivers were uncomfortable with the idea that the system could silently change state without them realizing it.
The challenge was not simply improving the technology.
The challenge was designing an interaction model that reinforced awareness, trust, and system state clarity.
Concept: The Autonomous Controller
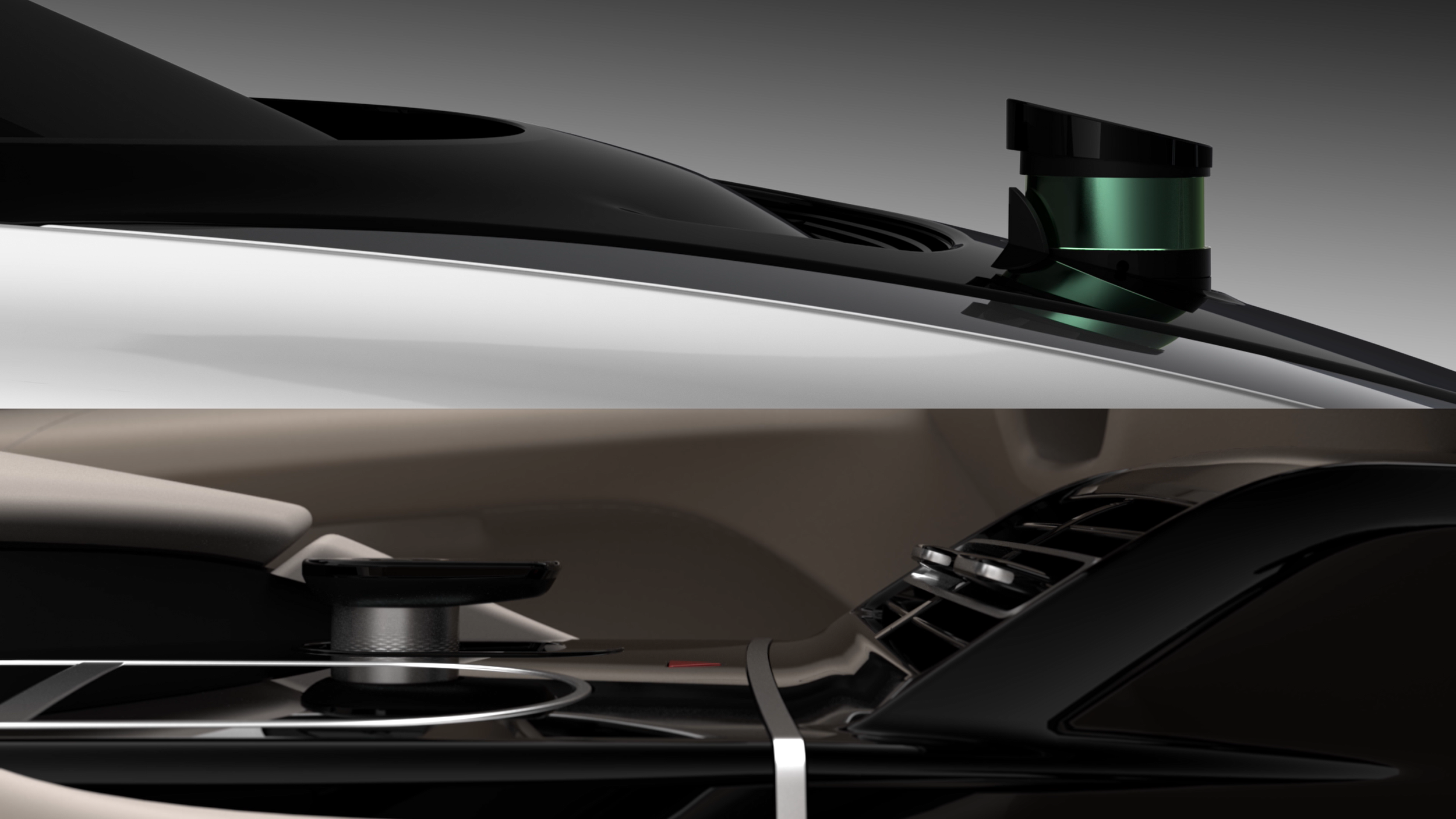
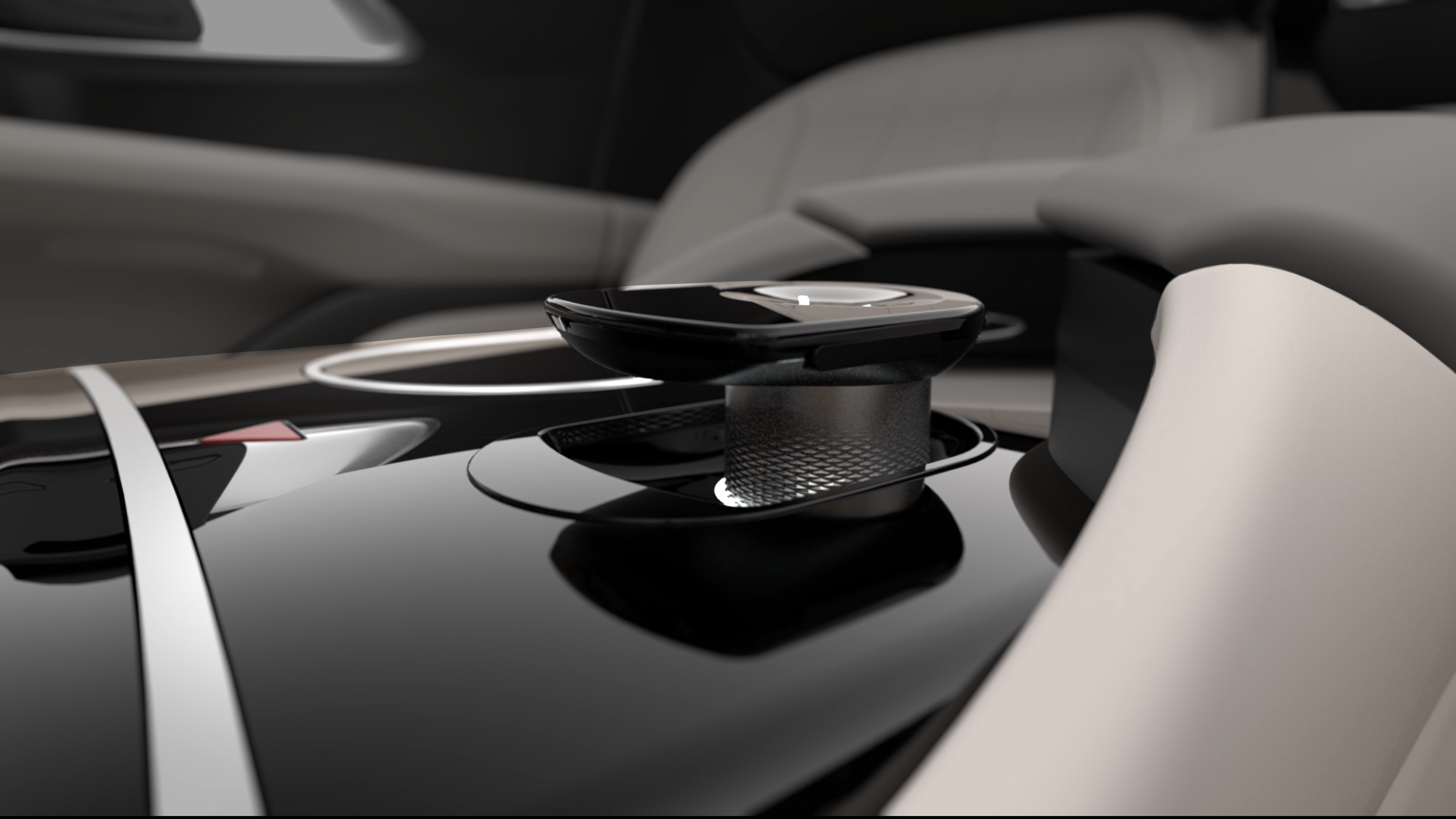
To address this challenge, I designed a dedicated Autonomous Controller located in the center console.
When autonomous mode is activated, the controller motorizes upward into a usable position. When autonomy disengages, it automatically returns to its docked state.
This physical motion reinforces the vehicle’s operating state and creates a clear separation between manual and autonomous interaction.
The controller allows drivers to request actions from the vehicle without touching the steering wheel, preserving autonomous engagement while still allowing the driver to influence vehicle behavior.
System Architecture
The controller communicates with the vehicle’s autonomous driving system, which interprets the surrounding environment through sensor fusion including LiDAR, radar, cameras, and navigation data.
When the driver requests an action such as a lane change or speed adjustment, the autonomous system evaluates surrounding traffic conditions and determines whether the maneuver can be safely executed.
The driver provides intent.
The system maintains authority.
Controller Interaction Model
The controller interaction model was designed to be intuitive while prioritizing safety.
Three primary functions were supported:
• adjusting following distance
• adjusting cruise speed
• requesting lane changes
Gap Distance Adjustment
Tilt Forward
Reduces the following distance.
Pull Back
Increases the following distance.
The system supports six gap settings, allowing drivers to fine-tune the distance between vehicles.
Gap adjustment is the default interaction because it is inherently safe. Even if the controller is accidentally nudged, the vehicle simply adjusts following distance rather than speed.
Cruise Speed Adjustment
Cruise speed requires an intentional modifier.
Press Side Button + Tilt Forward
Increase set cruise speed.
Press Side Button + Pull Back
Decrease set cruise speed.
This two-step interaction prevents accidental speed changes caused by passengers, pets, or unintended contact with the controller.
Without this safeguard, a simple forward tilt could dramatically increase vehicle speed. Requiring a button press significantly reduces the risk of unintended acceleration.
Lane Change Control
Twist or slide the controller left or right to request a lane change.
Twist Left
Initiate lane change to the left lane.
Twist Right
Initiate lane change to the right lane.
The autonomous system verifies traffic conditions before executing the maneuver.
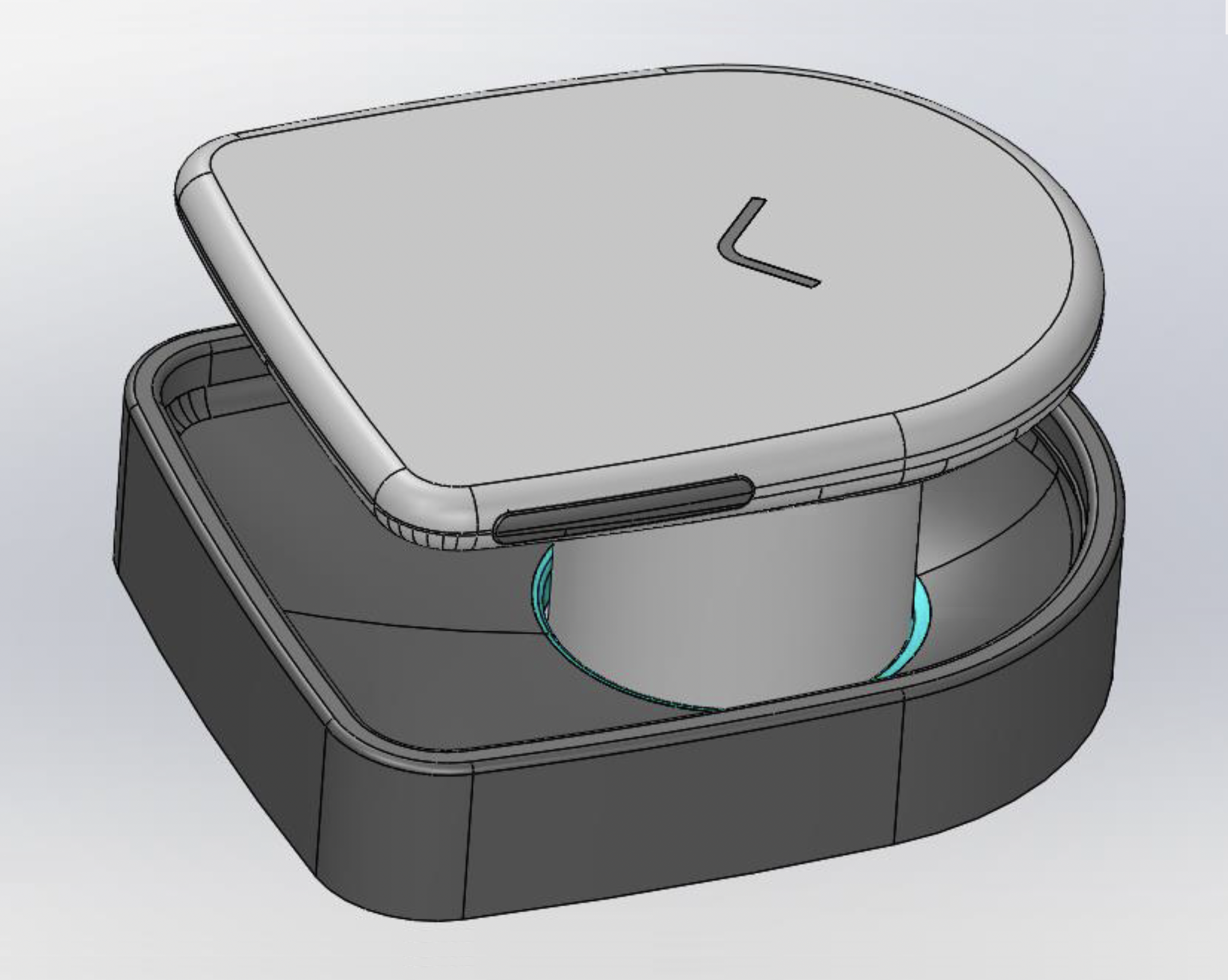
Hardware Interface Design
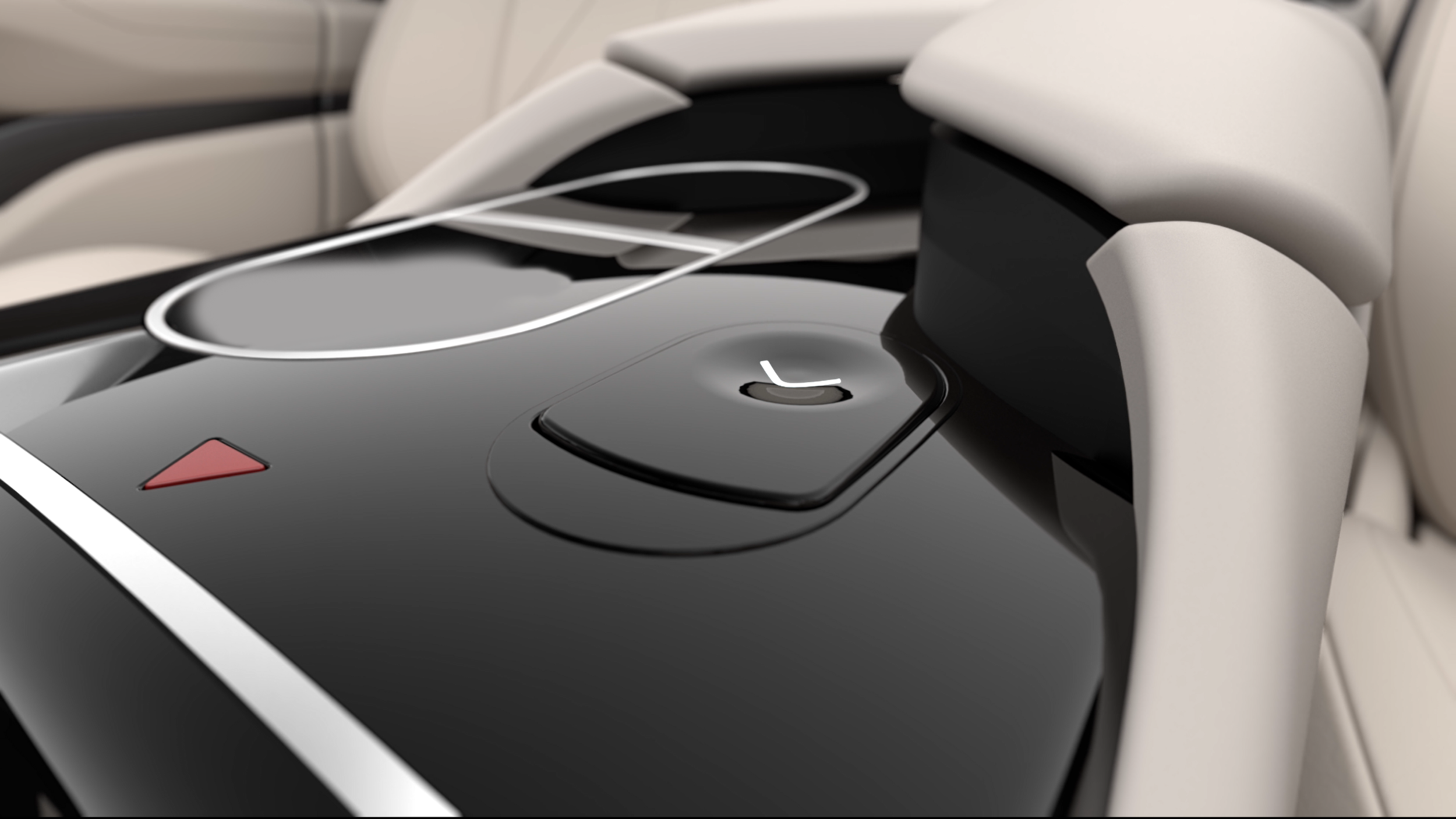
The controller is a motorized hardware interface integrated into the center console.
Key design characteristics include:
• mechanical detents for tactile feedback
• motorized deployment and stowing
• LED illumination for system status
• dedicated safety modifier button
• compact footprint integrated into console surfaces
When autonomy is engaged, the controller rises into the use position. When autonomy disengages, the controller returns to its docked state.
This movement provides a clear physical indication of system state.
Safety-Driven Interaction Design
Because the controller directly influences vehicle behavior, interaction design was developed alongside functional safety analysis.
I authored the HARA (Hazard Analysis and Risk Assessment) specification for the controller interface.
Several design decisions were informed by this process.
Safe Default Interaction
Gap distance adjustment was made the default interaction because it carries minimal safety risk.
Intentional Speed Changes
Cruise speed adjustments require a secondary button input, preventing unintended speed changes.
System Authority
Lane change requests are validated by the autonomous driving system before execution.
These safeguards significantly reduced potential hazard classifications while maintaining an intuitive user experience.
Patent
The Autonomous Controller interaction model and system architecture were patented as part of the Faraday Future autonomous driving platform.
Adaptive Cruise Control System Having Center-Console Access
US Patent 10,322,721
The patent describes a center-console access device capable of generating control signals for vehicle acceleration, braking, and steering within an adaptive cruise system.
Additional System Visualization
This visualization demonstrates how the autonomous driving system interprets the surrounding environment and evaluates driver requests generated through the controller interface.
Reflection
Autonomous driving changes the role of the driver.
Yet most vehicle interfaces still rely on controls designed for manual operation.
The Autonomous Controller explored how a dedicated interaction device could bridge that gap, allowing drivers to communicate intent to the vehicle without interfering with autonomous operation.
By separating autonomous interaction from traditional driving controls, the design reinforces system awareness, reduces accidental disengagement, and helps drivers maintain confidence in the vehicle’s capabilities.
Designing for autonomy is not just about sensors and algorithms.
It is about creating interaction models that help humans understand and trust the systems guiding them.
These images illustrate the physical controller concept, its integration into the center console, and interaction details explored during development.